【Android进阶】车载通信架构——CAN分布式
本文介绍了车载通信架构中的CAN(Controller Area Network)通信协议相关内容。
车载通信中的CAN(Controller Area Network,控制器局域网)协议是汽车电子系统中应用最广泛的串行通信协议之一,一种专门为恶劣环境设计的串行通信协议。它的老家是德国,由博世公司在1986年正式发布,后来被写进了ISO11898-1标准,定义了OSI模型的数据链路层和物理层。
其设计初衷是为了解决汽车内部日益复杂的电子控制单元(ECU)之间的通信需求,替代传统的点对点布线方式,以减少线束重量、降低成本并提高通信可靠性。
现在,它已广泛应用于汽车、工业自动化、医疗设备等领域,作为一种高效、可靠的通信方式。
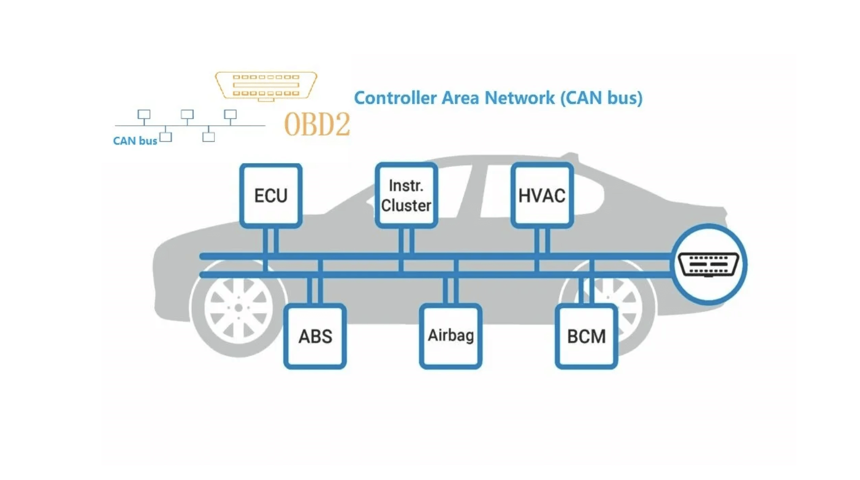
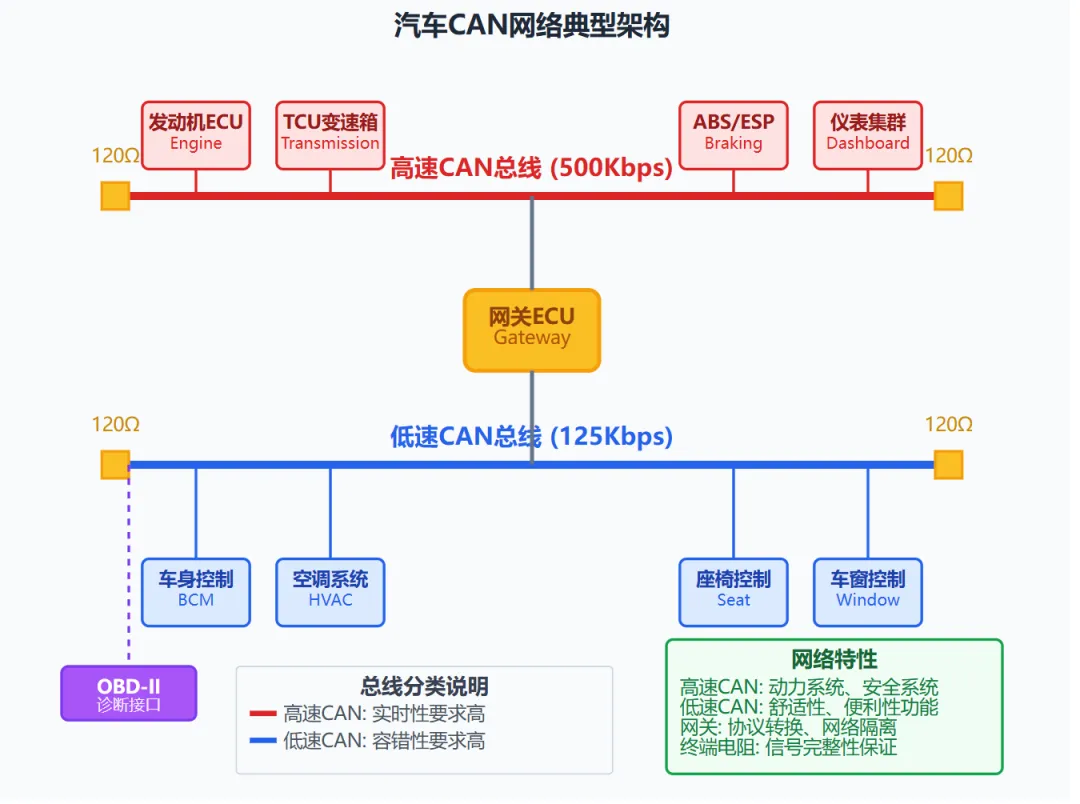
一种典型架构
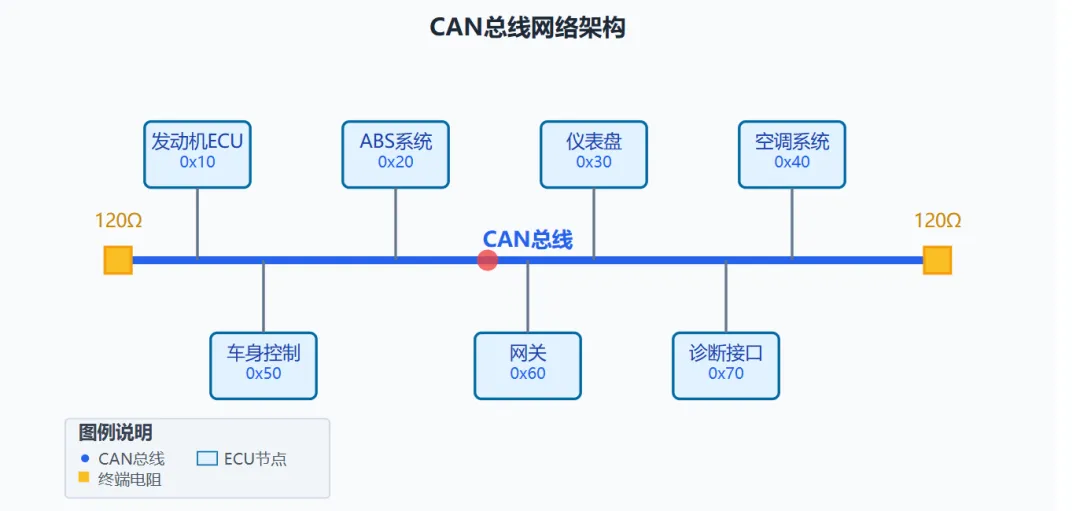
CAN 总线是一种消息导向(message-based)的通信协议,而不是地址导向(address-based)。这意味着总线上的所有设备(称为节点或 ECU - Electronic Control Unit)都能“听到”所有传输的消息,每个消息都包含一个标识符(ID),而不是一个目标地址。节点会根据这个 ID 来决定是否接收和处理该消息。
核心设计目标
CAN的诞生初衷是为了解决汽车内部电子控制单元(ECU)之间通信的麻烦。以前,ECU之间需要一大堆线缆连接,布线复杂得像蜘蛛网。CAN总线的出现让这一切变得简单:只需一对差分信号线,就能让所有ECU愉快地聊天。
CAN总线有以下几个特点:
- 多主站(Multi-master):网络中没有中心控制器,所有节点(ECU)都可以在总线空闲时尝试发送消息,适合分布式电子架构。
- 广播(Broadcast):所有发送的消息都会被网络中的所有节点接收。
- 优先级仲裁(Arbitration):当多个节点同时尝试发送消息时,CAN 总线通过一个基于消息 ID 的仲裁机制来解决冲突。ID 值越低,优先级越高,拥有更高优先级的消息会赢得总线,而低优先级的消息会暂停发送,等待总线空闲后重试。
- 高可靠性和容错性(High Reliability and Fault Tolerance):CAN 总线内置了强大的错误检测和错误处理机制,例如循环冗余校验(CRC)、位填充(Bit Stuffing)和应答(ACK),确保数据传输的完整性。即使出现错误,系统也能进行错误隔离和恢复。
- 低成本:简化线束设计(两根信号线即可连接所有节点),降低整车布线复杂度与成本。
- 差分信号传输(Differential Signalling):CAN 总线通过两根双绞线(CAN_H 和 CAN_L)传输差分信号,这有助于抵御电磁干扰(EMI),使其在嘈杂的环境中也能可靠工作。
- 终端电阻(Termination Resistors):CAN 总线两端需要各放置一个 120 欧姆的终端电阻,以消除信号反射,保证信号完整性。
- 实时性:通过优先级仲裁机制确保关键信息(如制动、安全气囊控制)优先传输。
CAN协议的物理层与数据链路层
CAN协议分为物理层和数据链路层(逻辑链路控制子层LLC和介质访问控制子层MAC),其中物理层和MAC子层由CAN标准(ISO 11898)定义,LLC子层由用户自定义。
物理层
- 信号传输介质:通常采用双绞线(CAN_H和CAN_L),通过差分信号传输(平衡传输),抗干扰能力强。
- 信号电平:
- 显性电平(Dominant):CAN_H电压高于CAN_L(典型值:CAN_H=3.5V,CAN_L=1.5V),逻辑“0”。
- 隐性电平(Recessive):CAN_H与CAN_L电压相等(约2.5V),逻辑“1”。
- 优先级规则:显性电平可覆盖隐性电平(类似“线与”逻辑),用于仲裁。
- 通信速率:支持多种速率(如125kbps、250kbps、500kbps、1Mbps等),速率越高,通信距离越短(例如1Mbps时最大距离约40米,500kbps时约100米)。
数据链路层
一个标准CAN消息帧包含以下几个关键部分:

- 帧起始(SOF):一个显性位,标志着消息的开始,相当于敲门声,提醒大家有新消息来了。
- 标识符(ID):11位长度,决定了消息的优先级。ID越小,优先级越高。这就像在群聊里,谁的ID靠前,谁的消息就先被处理。
- 远程传输请求(RTR):通常是显性位,但当某个节点想请求数据时,会变成隐性位。
- 标识符扩展(IDE):显性位表示这是标准CAN帧,不是扩展帧。
- 数据长度码(DLC):4位,告诉接收方这次消息带了多少字节数据。
- 数据字段:实际要传的内容,最多8字节。比如发动机转速、油门开度啥的。
- 循环冗余校验(CRC):16位校验码,用来检测传输错误,堪称数据的保镖。
- 应答位(ACK):接收方如果正确收到消息,会把这个隐性位覆盖为显性位,相当于说:收到,靠谱!
- 帧结束(EOF):7位隐性位,用于标记消息结束,同时检测是否有位填充错误。
- 帧间间隔(IFS):一段空闲时间,让CAN控制器有空把收到的消息塞进缓冲区。
后来,CAN升级了,推出了扩展CAN,把标识符从11位扩展到29位,消息ID数量暴增到2的29次方,满足更复杂的应用场景。扩展帧在11位ID后加了个替代远程请求(SRR)位,IDE位变成隐性,表示后面还有18位ID。其他部分和标准帧差不多。
消息类型
CAN总线支持四种消息类型:
- 数据帧(Data Frame):用于传输实际数据。这是最常见的帧类型。RTR和IDE都是显性位。
- 远程帧(Remote Frame):用于请求其他节点发送特定 ID 的数据帧。不带数据,RTR为隐性,用于请求某个节点发送数据,相当于喊一嗓子:兄弟,发个数据包过来!
- 错误帧(Error Frame):当节点检测到错误时发送,通知网络其他节点有错误发生,然后出错的节点会重发消息。
- 过载帧(Overload Frame):用于通知总线上当前负载过高,请求短暂延迟。当某个节点忙不过来,处理不过收到的帧时,会发个过载帧,争取点喘息时间。
CAN协议的关键机制
多主仲裁机制
简单来说,就是解决多个节点同时想发消息时的优先级问题。
- 所有节点通过总线竞争发送数据时,ID数值越小的帧优先级越高(例如ID=0x100的帧优先于ID=0x200的帧)。
- 仲裁过程:节点同时发送数据时,逐位比较电平。若某节点发送隐性电平(1),而总线上出现显性电平(0),则该节点主动退出竞争,转为接收状态。
错误检测与处理
- 错误类型:位错误(发送与接收电平不一致)、填充错误(连续5个相同电平未插入相反电平)、CRC错误、格式错误、ACK错误等。
- 错误处理:节点检测到错误后发送错误帧,通知所有节点丢弃当前帧;错误计数器记录错误次数,超过阈值(如127次)的节点进入“被动错误状态”(仅能发送被动错误帧),严重错误时进入“总线关闭状态”(暂时退出通信)。
数据重传机制
- 若发送方未收到ACK确认(可能因接收方故障或总线冲突),会自动重传数据帧(最多重传多次,具体次数由实现决定)。
CAN协议的扩展版本
为满足更高数据传输需求,CAN协议衍生出多个扩展版本:
- CAN FD(Flexible Data-Rate):
- 核心改进:数据段速率可提升至5Mbps(仲裁段仍保持较低速率),数据场长度扩展至64字节(标准CAN仅8字节)。
- 应用场景:适用于需要传输大量数据的应用(如高级驾驶辅助系统ADAS、摄像头数据传输)。
- CAN XL:
- 更高带宽:支持更高速率(如10Mbps以上)和更大 payload(最高2048字节),面向未来智能汽车的高带宽需求。
CAN协议在车载网络中的应用
CAN总线在汽车电子和工业控制领域简直无处不在。
比如新能源汽车的BMS(电池管理系统),通过CAN总线实时监控电池状态,SOC、SOH、温度、电压等数据飞速在ECU间传递。
工业领域,像是Modbus或DeviceNet这样的协议,底层也靠CAN总线撑腰。
相比传统的点对点连接,CAN总线的多主架构让系统扩展性强到爆,甚至随手加个节点都随随便便。
想象一下现代汽车,发动机控制、ABS、仪表盘、空调系统……每个模块都是一个ECU,它们通过CAN总线组成一个高效的通信网络。
就像一群人在群聊里实时交流,消息井然有序,互不干扰。比如你踩油门,发动机ECU立马收到指令,调整喷油量,整个过程非常顺畅。
- 典型应用场景:
- 动力系统:发动机控制、变速箱控制(需高实时性)。
- 底盘系统:ABS防抱死、ESP电子稳定程序。
- 车身电子:车窗控制、灯光控制、空调系统。
- 安全系统:安全气囊、碰撞检测。
- 与其他车载网络的协同:
- CAN通常作为整车通信的骨干网络,与LIN(低速、低成本,用于车窗等简单设备)、FlexRay(高实时性、高带宽,用于底盘控制)、以太网(大数据传输,如自动驾驶传感器数据)协同工作,形成分层网络架构。
CAN协议凭借其高可靠性、实时性和低成本优势,成为汽车电子通信的基石。随着汽车智能化与电动化的发展,CAN FD和CAN XL等扩展版本进一步提升了带宽与数据处理能力,而CAN与其他车载网络(如以太网)的协同也将成为未来车载通信架构的核心趋势。
如何分析 CAN 总线通信协议
分析 CAN 总线通信通常涉及到捕获总线上的原始数据,然后对这些数据进行解码和解释,以理解各个消息的含义。对于 Android 开发者来说,这可能涉及到通过蓝牙 OBD-II 适配器与车辆 CAN 总线交互,或者在嵌入式系统中直接与 CAN 控制器通信。
1. 硬件工具准备:
- CAN 总线分析仪/接口卡:这是最核心的工具。它们可以将 CAN 总线上的物理信号转换为计算机可以理解的数字信号。常见的有:
- USB 转 CAN 接口:如 PCAN-USB, Kvaser USBcan, IXXAT USB-to-CAN 等。这些通常用于连接到 PC 进行分析。
- OBD-II 转 CAN 适配器:对于汽车应用,许多 OBD-II 适配器(例如 ELM327 兼容的蓝牙或 Wi-Fi 适配器)可以让你通过手机或电脑访问车辆的 CAN 总线数据,但功能可能受限。
- 连接线缆:连接 CAN 分析仪和 CAN 总线(通常是 OBD-II 端口或直接连接到 CAN_H/CAN_L)。
- 带有合适软件的计算机:用于捕获、显示和解析 CAN 数据。
2. 软件工具准备:
- CAN 总线监测软件:大多数 CAN 接口卡都附带自己的软件,例如 PCAN-View, Kvaser CanKing 等。这些软件可以实时显示总线上的消息,包括 ID、数据、时间戳等。
- CAN 数据库文件(DBC 文件):这是分析 CAN 数据的关键。DBC 文件是一种标准格式,它包含了 CAN 消息的定义,例如:
- 每个 CAN ID 对应的消息名称。
- 每个消息中各个信号(Sensor Readings, Status, Commands)的起始位、长度、字节顺序(大小端)、缩放因子、偏移量和单位。
- 信号的有效值范围。
- 枚举值(例如,某个字节代表“开”或“关”)。 有了 DBC 文件,原始的十六进制数据就能被解析成有意义的物理值,例如发动机转速、车速、油门位置等。
- 数据分析工具:如果需要更深入的分析,可以使用 MATLAB/Simulink, Python (使用
python-can库), Wireshark (结合 CAN 插件) 等工具进行数据处理、可视化和模式识别。
3. 分析步骤:
- 连接硬件:将 CAN 分析仪连接到目标 CAN 总线。对于汽车,通常是连接到 OBD-II 端口。确保总线已上电。
- 配置软件:
- 选择正确的 CAN 接口:在软件中选择你连接的 CAN 接口设备。
- 设置波特率(Baud Rate):CAN 总线上的所有设备必须以相同的波特率通信(例如 500 kbps, 250 kbps)。你需要根据目标系统设置正确的波特率。许多分析仪支持自动检测。
- 设置过滤(Filtering):如果你只对特定 ID 的消息感兴趣,可以设置 ID 过滤器,以减少显示的数据量。
- 捕获数据:开始捕获 CAN 总线上的数据。你会看到一系列十六进制的 CAN 帧。
- 观察总线活动:注意哪些 ID 的消息频繁出现,哪些消息在特定操作下(例如踩油门、刹车)会发生变化。
- 触发特定事件:在分析车辆 CAN 总线时,执行特定的操作(如打开车窗、踩刹车、启动引擎等),然后观察哪些 CAN 消息随之变化。这有助于你找到与这些操作相关的消息 ID 和数据。
- 解码数据(使用 DBC 文件):
- 导入 DBC 文件:将对应的 DBC 文件导入你的 CAN 分析软件。
- 实时解析:软件会根据 DBC 文件的定义,将原始的十六进制数据自动解析成有意义的信号值(例如,从
0x1A0ID 的消息中解析出“发动机转速”为 2500 RPM)。 - 手动解码(如果无 DBC):如果没有 DBC 文件,你需要进行逆向工程。这通常是一个耗时且需要经验的过程:
- 隔离消息:通过筛选和观察,找到你感兴趣的特定功能(如车速、门状态)对应的 CAN ID。
- 分析数据变化:对特定 ID 的数据字段进行多次捕获,每次都改变对应的物理量(例如,让车速从 0 加速到 100 km/h,观察数据字段的十六进制值如何变化)。
- 推断数据格式:根据数据变化的规律,推断出数据的字节顺序、长度、缩放因子、偏移量。这可能需要了解一些常见的编码方式,如 little-endian/big-endian,有符号/无符号整数,浮点数等。
- 创建自己的 DBC 文件:当你识别出一些信号后,可以创建自己的 DBC 文件来记录这些发现,方便后续分析和开发。
- 数据分析与应用:
- 数据可视化:将解析出的信号数据绘制成图表,更直观地观察其变化趋势。
- 故障诊断:通过分析 CAN 消息,可以识别通信故障、传感器故障或 ECU 内部问题。
- 功能开发:对于 Android 开发者,理解 CAN 消息后,你可以在应用程序中读取车辆数据(例如仪表盘信息、故障码),或发送特定指令来控制车辆功能(如果允许且安全)。
CAN协议的优缺点
- 优点:
- 高可靠性:抗干扰能力强,错误检测与恢复机制完善。
- 实时性强:优先级仲裁确保关键信息优先传输。
- 成本低:简化线束设计,降低整车成本。
- 成熟生态:广泛支持的工具链和芯片(如NXP、Infineon的CAN控制器)。
- 缺点:
- 带宽有限:标准CAN最大速率1Mbps,数据场仅8字节,难以满足高清摄像头等大数据传输需求(需CAN FD或以太网补充)。
- 无内置加密:需额外机制(如SecOC)保障信息安全(针对新能源车的V2X通信需求)。
下一篇将介绍基于中央服务的SOA架构,和CAN总线的分布式架构做对比。